V Škola architektonického sdružení v Londýně pracují na programu Graduate Design na designových studiích "Behavioural Complexity", zejména 3D tištěných a pneumatických robotů, které slouží jedinému, velmi specifickému účelu nebo fungují podle jediného "jednoduchého" algoritmu. Například Synergia je koncept pro programovatelnou hmotu s pneumatickými rojemi robotických kostek, OwO jsou něco jako robotí červi pro veřejný prostor.

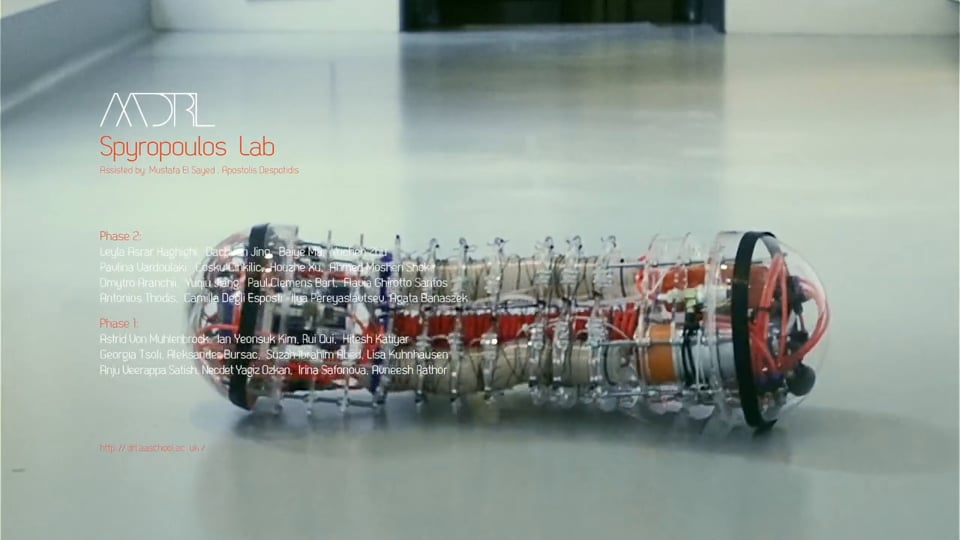
AADRL Spyropoulos Design Lab 2016 (Fáze 2)
Kreativní aplikace má přehled o Závěrečné práce 2016. Informační texty lze napůl ignorovat, z rolákových svetrů je vždy spousta honosných designových ozdob, ale samotná práce by mohla být ve skutečnosti provedena pro NASA a její pneumatické moduly, jako je tento Bigelow Space Habitat být zajímavý.
Následuje práce AADRL Spyropoulos Design Lab, která zkoumá návrhové systémy založené na chování, které jsou sebevědomé, mobilní a mají vlastní strukturu a sestavují se. Výzkum zkoumá látky s vysokou mobilitou populace, které vyvíjejí design, který se pohybuje od konečných koncepcí prostoru k tomu, který se vyvíjí a přizpůsobuje. Výzkum se zaměřuje na vývoj strategií inteligentních konstrukčních jednotek, které prostřednictvím organizace vytvářejí plány těla, které umožňují vznik nového chování. Příkladem toho je projekt OWO, pod nímž je jako jednotná jednotka pojímána jako jednotka, která prostřednictvím vložené pneumatiky umožňuje jednotce roztahovat / smršťovat se, vlnit se a rolovat. Pokud jde o mobilitu jako samostatnou jednotku, může se pohybovat ve svém mobilním režimu, ale například se jednotka připojí ke dvěma dalším jednotkám, pak plán těla umožňuje konfiguraci stativu, která umožňuje tvorovi chodit.
AADRL Spyropoulos Design Lab
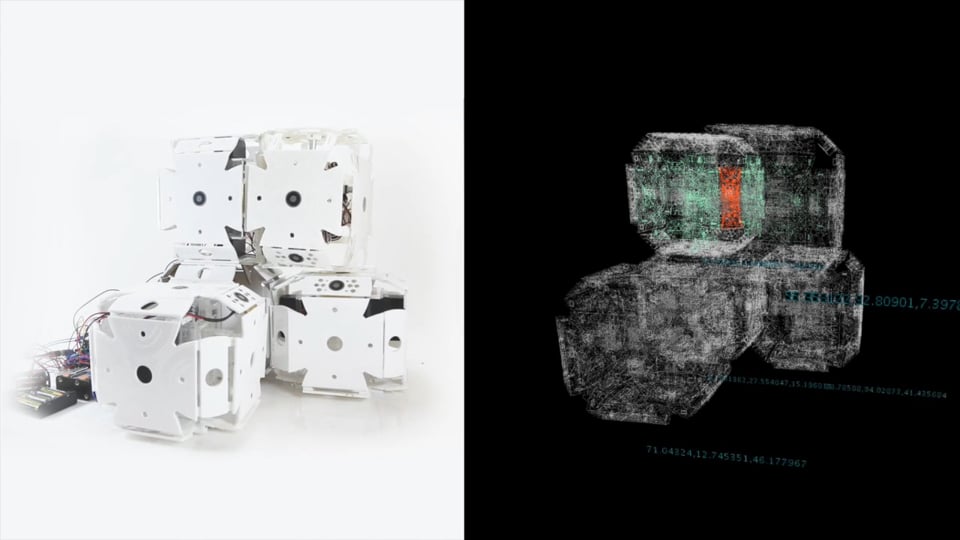
AADRL Spyropoulos_HyperCell
Více pro vás:






 „Dravens Tales from the Crypt“ okouzluje již více než 15 let nevkusnou směsí humoru, seriózní žurnalistiky – pro aktuální události a nevyváženého zpravodajství v tiskové politice – a zombie, zdobený spoustou umění, zábavy a punk rocku. Draven ze svého koníčka udělal oblíbenou značku, kterou nelze zařadit.
„Dravens Tales from the Crypt“ okouzluje již více než 15 let nevkusnou směsí humoru, seriózní žurnalistiky – pro aktuální události a nevyváženého zpravodajství v tiskové politice – a zombie, zdobený spoustou umění, zábavy a punk rocku. Draven ze svého koníčka udělal oblíbenou značku, kterou nelze zařadit.
Můj blog nikdy nebyl navržen tak, aby šířil zprávy, natož aby byl politický, ale s aktuálními událostmi si prostě nemohu pomoci a nezachytím zde informace, které jsou jinak cenzurovány na všech ostatních kanálech. Jsem si vědom toho, že designová stránka nemusí mnohým v tomto ohledu připadat „seriózní“, ale nebudu to měnit, abych se zalíbil „mainstreamu“. Každý, kdo je otevřený informacím, které nejsou v souladu se státem, vidí obsah, nikoli obal. Za poslední 2 roky jsem se snažil poskytnout lidem informace, ale rychle jsem si všiml, že nezáleží na tom, jak jsou „zabalené“, ale jaký k tomu má postoj druhého. Nechci nikomu natírat med na ústa, abych v žádném případě splnil očekávání, takže si nechám tento návrh, protože doufejme, že v určitém okamžiku budu moci přestat s těmito politickými prohlášeními, protože není mým cílem pokračovat takhle navždy ![]() Nechám na každém, jak se k tomu postaví. Nicméně, můžete jednoduše kopírovat a distribuovat obsah, můj blog byl vždy pod Licence WTFPL.
Nechám na každém, jak se k tomu postaví. Nicméně, můžete jednoduše kopírovat a distribuovat obsah, můj blog byl vždy pod Licence WTFPL.
Je pro mě těžké popsat, co tady vlastně dělám, z DravensTales se v průběhu let stal blog o kultuře, hudební blog, šokující blog, tech blog, hororový blog, zábavný blog, blog o nalezených položkách na webu, o internetu bizarní, trash blog, art blog, ohřívač vody, blog zeitgeistů Volal blog šrotu a blog sáčku. Všechno, co je správné ... - a přesto ne. Hlavním zaměřením blogu je současné umění v nejširším slova smyslu.
Pro zajištění provozu stránek jste vítáni Darujte kreditní kartou, Paypal, Google Pay, Apple Pay nebo inkasem/bankovním účtem. Všem čtenářům a příznivcům tohoto blogu moc děkujeme!